



三菱PLC FX5U定位时的故障及排除方法
三菱PLC FX5U定位时的故障及排除方法
时间:2015-11-02 来源:未知 作者:admin 点击:31821次
三菱PLC FX5U定位时的故障及排除方法(FX5U定位故障)
一、脉冲输出/旋转方向输出的LED状态
可以通过CPU模块中所设置的输出软元件(Y)的LED的亮灯状况,确认是否进行定位动作。
┌─────┬──┬──┬──┬──┬───────┬────────────────┐
│ 信号名称 │轴1 │轴2 │轴3 │轴4 │定位指令执行中│内容 │
│ │ │ │ │ │的LED的状态 │ │
├─┬───┼──┼──┼──┼──┼───────┼────────────────┤
│脉│PULSE │Y0 │Y1 │Y2 │Y3 │闪烁 │通过定位指令正在控制脉冲输出。 │
│冲│(脉冲 │ │ │ │ │(高速地ON/OFF)│ │
│输│串) │ │ │ │ ├───────┼────────────────┤
│出│ │ │ │ │ │OFF │考虑可能是以下状态。 │
│端│ │ │ │ │ │ │1)定位指令的动作结束了。 │
│ │ │ │ │ │ │ │2)因定位指令出错,指令不动作。 │
│ ├───┼──┼──┼──┼──┼───────┼────────────────┤
│ │CF │Y0 │Y2 │ - │ - │闪烁 │通过定位指令正在进行正转动作。 │
│ │(正转 │ │ │ │ │(高速地ON/OFF)│此时。反转脉冲串置为OFF. │
│ │脉冲 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考虑可能是以下状态. │
│ │ │ │ │ │ │ │1)定位指令的动作结束了。 │
│ │ │ │ │ │ │ │2)因定位指令出错,指令不动作。 │
├─┼───┼──┴──┴──┴──┼───────┼────────────────┤
│旋│SIGN │Y0~Y17 │ON │正在正转动作。 │
│转│(方向)│ ├───────┼────────────────┤
│方│ │ │OFF │考虑可能是以下状态。 │
│向│ │ │ │1)正在采用定位指令进行反转动作。│
│输│ │ │ │2)因定位指令出错,指令不动作。 │
│出├───┼──┬──┬──┬──┼───────┼────────────────┤
│ │CCW │Y1 │Y3 │ - │- │闪烁 │通过定位指令正在进行反转动作。 │
│ │(反转 │ │ │ │ │(高速地ON/OFF)│此时,正转脉冲串置为OFF。 │
│ │脉冲 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考虑可能是以下状态. │
│ │ │ │ │ │ │ │1)定位指令的动作结束了。 │
│ │ │ │ │ │ │ │2)因定位指令出错,指令不动作。 │
└─┴───┴──┴──┴──┴──┴───────┴────────────────┘
二、出错的确认
1、通用出错
发生了与定位以外的功能通用的出错(运算出错、参数出错)时,下述的出错标志位将置为ON。
┌───────┬─────────┬──────┐
│最新自诊断出错│最新自诊断出错 │运算出错 │
│(包含报普器ON)│(不包含报警器ON) │ │
├───────┼─────────┼──┬───┤
│SM0 │SM1 │SM56│SM8067│
└───────┴─────────┴──┴───┘
上述出错标志位置为ON后,出错代码将存储在下述软元件中。此外,通用出错将存储全部轴的出错代码。
┌─────────┬──────────┐
│最新自诊断出错代码│最新自诊断出错 │
│(包含报普器ON) │(不包含报警器ON) │
├─────────┼──────────┤
│SD0 │SMD8067 │
└─────────┴──────────┘
三、伺服电机、步进电机
伺服电机、步进电机不转时,请确认以下项目。
1) 请确认接线。
2) 请执行定位指令,确认以下的LED的状态。
• 设定为脉冲输出端软元件的输出信号的LED
• 设定为旋转方向输出的输出信号的LED
3) 请确认可编程控制器侧和伺服放大器(驱动单元)的脉冲输出形式是否相符。
4) 请确认停止脉冲输出的标志位是否动作。
5) 请确认定位指令的动作时机。
四、停止位置
停止位置不正确时,请确认以下项目。
1) 请确认伺服放大器(驱动单元)的电子齿轮的设定是否正确。
2) 请确认原点位置是否偏移。
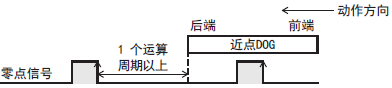
a) 设计近点DOG信号时,请考虑有足够为ON的时间能充分减速到爬行速度。DSZR/DDSZR指令为,
在近点DOG的前端开始减速到爬行速度,在“近点DOG的后端”或者“从近点DOG的后端开始
检测出第一个零点信号”时停止,清除当前地址。
b) 请使爬行速度足够的慢。DSZR/DDSZR指令的停止是不进行减速停止的,所以如果爬行速度过快,
会由于惯性导致停止位置偏移。
c) 近点DOG信号的检测(前端、后端)受到应答时间及顺控程序的运算周期的影响。请将从DOG后端到
零点信号置为ON空出1个运算周期以上。
d) 使用DSZR/DDSZR指令时,因为使用伺服电机的零点信号,所以请按照以下关系调整DOG的后端和
零点信号。或者在需要对原点位置做微调时,请调整近点DOG信号的位置。
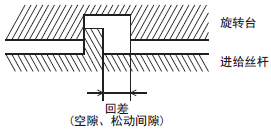
3) 进行正反转动作(往返动作)后,停止位置有偏离时
定位功能不能修正机械单位制的回差(空隙、松动间隙)。如果需要修正,或在移动方向反转动作时,
请预先考虑回差部分,从而设定输出脉冲数。
一、脉冲输出/旋转方向输出的LED状态
可以通过CPU模块中所设置的输出软元件(Y)的LED的亮灯状况,确认是否进行定位动作。
┌─────┬──┬──┬──┬──┬───────┬────────────────┐
│ 信号名称 │轴1 │轴2 │轴3 │轴4 │定位指令执行中│内容 │
│ │ │ │ │ │的LED的状态 │ │
├─┬───┼──┼──┼──┼──┼───────┼────────────────┤
│脉│PULSE │Y0 │Y1 │Y2 │Y3 │闪烁 │通过定位指令正在控制脉冲输出。 │
│冲│(脉冲 │ │ │ │ │(高速地ON/OFF)│ │
│输│串) │ │ │ │ ├───────┼────────────────┤
│出│ │ │ │ │ │OFF │考虑可能是以下状态。 │
│端│ │ │ │ │ │ │1)定位指令的动作结束了。 │
│ │ │ │ │ │ │ │2)因定位指令出错,指令不动作。 │
│ ├───┼──┼──┼──┼──┼───────┼────────────────┤
│ │CF │Y0 │Y2 │ - │ - │闪烁 │通过定位指令正在进行正转动作。 │
│ │(正转 │ │ │ │ │(高速地ON/OFF)│此时。反转脉冲串置为OFF. │
│ │脉冲 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考虑可能是以下状态. │
│ │ │ │ │ │ │ │1)定位指令的动作结束了。 │
│ │ │ │ │ │ │ │2)因定位指令出错,指令不动作。 │
├─┼───┼──┴──┴──┴──┼───────┼────────────────┤
│旋│SIGN │Y0~Y17 │ON │正在正转动作。 │
│转│(方向)│ ├───────┼────────────────┤
│方│ │ │OFF │考虑可能是以下状态。 │
│向│ │ │ │1)正在采用定位指令进行反转动作。│
│输│ │ │ │2)因定位指令出错,指令不动作。 │
│出├───┼──┬──┬──┬──┼───────┼────────────────┤
│ │CCW │Y1 │Y3 │ - │- │闪烁 │通过定位指令正在进行反转动作。 │
│ │(反转 │ │ │ │ │(高速地ON/OFF)│此时,正转脉冲串置为OFF。 │
│ │脉冲 │ │ │ │ ├───────┼────────────────┤
│ │串) │ │ │ │ │OFF │考虑可能是以下状态. │
│ │ │ │ │ │ │ │1)定位指令的动作结束了。 │
│ │ │ │ │ │ │ │2)因定位指令出错,指令不动作。 │
└─┴───┴──┴──┴──┴──┴───────┴────────────────┘
二、出错的确认
1、通用出错
发生了与定位以外的功能通用的出错(运算出错、参数出错)时,下述的出错标志位将置为ON。
┌───────┬─────────┬──────┐
│最新自诊断出错│最新自诊断出错 │运算出错 │
│(包含报普器ON)│(不包含报警器ON) │ │
├───────┼─────────┼──┬───┤
│SM0 │SM1 │SM56│SM8067│
└───────┴─────────┴──┴───┘
上述出错标志位置为ON后,出错代码将存储在下述软元件中。此外,通用出错将存储全部轴的出错代码。
┌─────────┬──────────┐
│最新自诊断出错代码│最新自诊断出错 │
│(包含报普器ON) │(不包含报警器ON) │
├─────────┼──────────┤
│SD0 │SMD8067 │
└─────────┴──────────┘
三、伺服电机、步进电机
伺服电机、步进电机不转时,请确认以下项目。
1) 请确认接线。
2) 请执行定位指令,确认以下的LED的状态。
• 设定为脉冲输出端软元件的输出信号的LED
• 设定为旋转方向输出的输出信号的LED
3) 请确认可编程控制器侧和伺服放大器(驱动单元)的脉冲输出形式是否相符。
4) 请确认停止脉冲输出的标志位是否动作。
5) 请确认定位指令的动作时机。
四、停止位置
停止位置不正确时,请确认以下项目。
1) 请确认伺服放大器(驱动单元)的电子齿轮的设定是否正确。
2) 请确认原点位置是否偏移。
a) 设计近点DOG信号时,请考虑有足够为ON的时间能充分减速到爬行速度。DSZR/DDSZR指令为,
在近点DOG的前端开始减速到爬行速度,在“近点DOG的后端”或者“从近点DOG的后端开始
检测出第一个零点信号”时停止,清除当前地址。
b) 请使爬行速度足够的慢。DSZR/DDSZR指令的停止是不进行减速停止的,所以如果爬行速度过快,
会由于惯性导致停止位置偏移。
c) 近点DOG信号的检测(前端、后端)受到应答时间及顺控程序的运算周期的影响。请将从DOG后端到
零点信号置为ON空出1个运算周期以上。
d) 使用DSZR/DDSZR指令时,因为使用伺服电机的零点信号,所以请按照以下关系调整DOG的后端和
零点信号。或者在需要对原点位置做微调时,请调整近点DOG信号的位置。
3) 进行正反转动作(往返动作)后,停止位置有偏离时
定位功能不能修正机械单位制的回差(空隙、松动间隙)。如果需要修正,或在移动方向反转动作时,
请预先考虑回差部分,从而设定输出脉冲数。
本页关键词:FX5U定位故障