



三菱PLC iQ-R运动控制器系统的配置
三菱PLC iQ-R运动控制器系统的配置
时间:2015-12-08 来源:未知 作者:admin 点击:5507次
三菱iQ-R运动控制器系统的配置(iQ-R运动控制器系统配置)
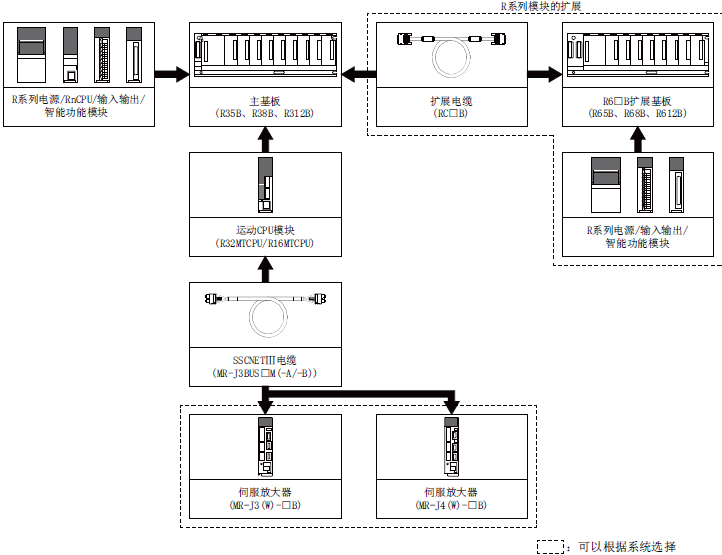
1、系统的设备配置
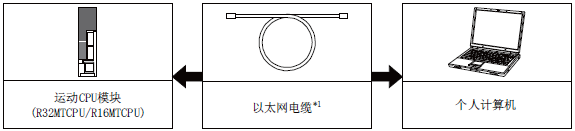
2、外围设备的配置
以太网配置图
*1 对应的以太网电缆
┌─────┬────┬─────┬─────┬────────┐
│ 产品名 │连接方法│电缆 │以太网标准│舰格 │
├─────┼────┼─────┼─────┼────────┤
│以太网电缆│经由集 │直出型电缆│10BASE-T │以太网标准对应品│
│ │器连接 │ ├─────┤电缆类别5以上 │
│ │ │ │100BASE-TX│·屏蔽双绞电缆 │
│ ├────┼─────┼─────┤ (STP电缆) │
│ │直接连接│直出型电缆│10BASE-T │ │
│ │ │交叉型电缆├─────┤ │
│ │ │ │100BASE-TX│ │
└─────┴────┴─────┴─────┴────────┘
■电缆选定条件
. 类别: 5以上
. 导体直径: AWG26以上
. 屏蔽: 带铜编织屏蔽及地线,或者铜编织屏蔽及铝带屏蔽
3、R32MTCPU/R16MTCPU系统总体配置

*1 仅MR-J4-口B-RJ
============---------==========注意=================================
A 控制器、伺服放大器异常时的动作可能威胁系统安全的情况下,应在控制器、伺服放大器的外部配置相应防范电路。
B 系统使用的部件(控制器、伺服放大器、伺服电机以外)的额定值、特性应适合于控制器、伺服放大器、伺服电机。
C 参数值应设置为适合于控制器、伺服放大器、伺服电机、再生电阻的型号、系统的用途。如果设置错误有可能导致保护功能不动作。
====================================================================
4、运动CPU模块功能说明
1)、在运动CPU模块中,可以进行以下伺服放大器控制。
┌─────┬────────────┐
│运动CPU │伺服放大器控制 │
├─────┼────────────┤
│R32MTCPU │2系统32轴(1系统最多16轴)│
├─────┼────────────┤
│R16MTCPU │1系统16轴 │
└─────┴────────────┘
2)、可以设置与运动运算周期同步,以恒定周期(最小0.222ms)执行的程序。
3)、通过在运动CPU模块与伺服放大器之间使用SSCNET电缆连接,可以进行至伺服放大器的伺服参数的下载、至伺服放大器的伺服ON/OFF、位置指令等。
4)、可以将输入输出模块、智能功能模块(部分模块除外)通过运动CPU模块进行管理。(21页 可通过运动CPU管理的可编程控
制器模块)
5)、在多CPU系统中,可以通过CPU缓冲存储器进行CPU之间的数据交换。
6)、通过将外部信号(上/下限行程限位、近点狗)经由伺服放大器输入,可以减少配线工时。
7)、运动CPU模块中不需要电池。
5、运动系统的限制事项
1)、多CPU系统组合
. 运动CPU模块不能单独使用。1号机需为MELSEC iQ-R系列的可编程控制器CPU模块。
. 对于MELSEC iQ-R系列的可编程控制器CPU模块/运动CPU模块,从主基板的CPU插槽(电源模块右邻的插槽)开始至I/O插槽6为止之间最多可安装4个。CPU模块按从左开始的顺序依次称为1号机~4号机。2~4号机的CPU模块的安装顺序无限制。1号机以
外的CPU中,可以进行CPU保留设置(即使未安装CPU模块也分配机号)。
. 运动CPU的启动(变为可控制状态为止)需要10秒左右。此后,需要各CPU的初始化时间。不等待其它机号的启动而开始执行程序的系统的情况下,应更改多CPU之间同步启动设置。
2)、运动CPU模块的限制事项
. 运动CPU模块只能管理MELSEC iQ-R系列模块。不能管理MELSEC Q系列模块。
. 紧急停止输入中,应使用紧急停止输入设置([运动CPU通用参数][基本设置])中指定的软元件。
. 关于运动CPU模块的DIN导轨安装,请参阅以下手册。
. 使用显示器(GOT)的情况下,应使用支持运动CPU(R32MTCPU/R16MTCPU)的版本。
3)、SSCNET通信的限制事项
. 与伺服放大器通信时,需要在SSCNET设置([运动CPU通用参数][伺服网络设置])中将各系統设置为“SSCNET/H”或“SSCNET”。设置了“SSCNET/H”的情况下可以使用MR-J4(W)-口B,设置了“SSCNET”的情况下可以使用MR-J3(W)-口B。
• 根据使用的通信方式及运算周期设置而不同。
1、系统的设备配置
2、外围设备的配置
以太网配置图
*1 对应的以太网电缆
┌─────┬────┬─────┬─────┬────────┐
│ 产品名 │连接方法│电缆 │以太网标准│舰格 │
├─────┼────┼─────┼─────┼────────┤
│以太网电缆│经由集 │直出型电缆│10BASE-T │以太网标准对应品│
│ │器连接 │ ├─────┤电缆类别5以上 │
│ │ │ │100BASE-TX│·屏蔽双绞电缆 │
│ ├────┼─────┼─────┤ (STP电缆) │
│ │直接连接│直出型电缆│10BASE-T │ │
│ │ │交叉型电缆├─────┤ │
│ │ │ │100BASE-TX│ │
└─────┴────┴─────┴─────┴────────┘
■电缆选定条件
. 类别: 5以上
. 导体直径: AWG26以上
. 屏蔽: 带铜编织屏蔽及地线,或者铜编织屏蔽及铝带屏蔽
3、R32MTCPU/R16MTCPU系统总体配置
*1 仅MR-J4-口B-RJ
============---------==========注意=================================
A 控制器、伺服放大器异常时的动作可能威胁系统安全的情况下,应在控制器、伺服放大器的外部配置相应防范电路。
B 系统使用的部件(控制器、伺服放大器、伺服电机以外)的额定值、特性应适合于控制器、伺服放大器、伺服电机。
C 参数值应设置为适合于控制器、伺服放大器、伺服电机、再生电阻的型号、系统的用途。如果设置错误有可能导致保护功能不动作。
====================================================================
4、运动CPU模块功能说明
1)、在运动CPU模块中,可以进行以下伺服放大器控制。
┌─────┬────────────┐
│运动CPU │伺服放大器控制 │
├─────┼────────────┤
│R32MTCPU │2系统32轴(1系统最多16轴)│
├─────┼────────────┤
│R16MTCPU │1系统16轴 │
└─────┴────────────┘
2)、可以设置与运动运算周期同步,以恒定周期(最小0.222ms)执行的程序。
3)、通过在运动CPU模块与伺服放大器之间使用SSCNET电缆连接,可以进行至伺服放大器的伺服参数的下载、至伺服放大器的伺服ON/OFF、位置指令等。
4)、可以将输入输出模块、智能功能模块(部分模块除外)通过运动CPU模块进行管理。(21页 可通过运动CPU管理的可编程控
制器模块)
5)、在多CPU系统中,可以通过CPU缓冲存储器进行CPU之间的数据交换。
6)、通过将外部信号(上/下限行程限位、近点狗)经由伺服放大器输入,可以减少配线工时。
7)、运动CPU模块中不需要电池。
5、运动系统的限制事项
1)、多CPU系统组合
. 运动CPU模块不能单独使用。1号机需为MELSEC iQ-R系列的可编程控制器CPU模块。
. 对于MELSEC iQ-R系列的可编程控制器CPU模块/运动CPU模块,从主基板的CPU插槽(电源模块右邻的插槽)开始至I/O插槽6为止之间最多可安装4个。CPU模块按从左开始的顺序依次称为1号机~4号机。2~4号机的CPU模块的安装顺序无限制。1号机以
外的CPU中,可以进行CPU保留设置(即使未安装CPU模块也分配机号)。
. 运动CPU的启动(变为可控制状态为止)需要10秒左右。此后,需要各CPU的初始化时间。不等待其它机号的启动而开始执行程序的系统的情况下,应更改多CPU之间同步启动设置。
2)、运动CPU模块的限制事项
. 运动CPU模块只能管理MELSEC iQ-R系列模块。不能管理MELSEC Q系列模块。
. 紧急停止输入中,应使用紧急停止输入设置([运动CPU通用参数][基本设置])中指定的软元件。
. 关于运动CPU模块的DIN导轨安装,请参阅以下手册。
. 使用显示器(GOT)的情况下,应使用支持运动CPU(R32MTCPU/R16MTCPU)的版本。
3)、SSCNET通信的限制事项
. 与伺服放大器通信时,需要在SSCNET设置([运动CPU通用参数][伺服网络设置])中将各系統设置为“SSCNET/H”或“SSCNET”。设置了“SSCNET/H”的情况下可以使用MR-J4(W)-口B,设置了“SSCNET”的情况下可以使用MR-J3(W)-口B。
• 根据使用的通信方式及运算周期设置而不同。
本页关键词:iQ-R运动控制器