



FX3U-1PG三菱PLC定位模块的1速定位
FX3U-1PG三菱PLC定位模块的1速定位
时间:2016-03-29 来源:未知 作者:admin 点击:6446次
FX3U-1PG三菱PLC定位模块的1速定位运行概述如下
通过1速定位运行开始指令,以运行速度Ⅰ运行,在目标地址Ⅰ减速停止。
1. 动作
1) 设定运行速度Ⅰ、目标地址Ⅰ。
2) 将运行指令的1速定位运行开始从OFF变成ON后,以运行速度Ⅰ开始1速定位运行。(定位结束标志位被置为OFF。)
3) 在目标地址Ⅰ减速停止,将定位结束标志位置为ON后结束运行。
http://www.fx-plc.com/upload/201603/250910536394.png
注意:移动量为0时,即便将1速定位运行开始置为ON,也不进行定位运行。此外,定位结束标志位也不发生变化。READY仅一瞬间置为OFF。
2. 地址指定
可指定绝对地址和相对地址。
指定绝对地址时:指定距离地址0的位置。
指定相对地址时:指定距离当前地址的移动量。
3. 旋转方向
指定绝对地址时:
旋转方向根据当前地址和目标地址Ⅰ的大小关系确定。
- 当前地址<目标地址Ⅰ:正转
- 当前地址>目标地址Ⅰ:反转
指定相对地址时:
旋转方向根据目标地址Ⅰ的符号(正/负)确定。
- 目标地址Ⅰ>0:正转
- 目标地址Ⅰ<0:反转
4. 定位结束标志位
运行开始时定位结束标志位置为OFF。
到达目标地址时,定位结束标志位置为ON。
┌────────────┬──────────────┐
│BFM编号 │设定项目 │
├─────┬──────┤ │
│定位参数 │扩展定位参数│ │
├─────┼──────┼──────────────┤
│#0 │#34, #33 │脉冲速率 │
├─────┼──────┼──────────────┤
│#2, #1 │#36. #35 │进给速率 │
├─────┼──────┼─────┬────────┤
│#3 bl, bO │#37 bl, bO │ │单位系统 │
├─────┼──────┤ ├────────┤
│#3 b5, b4 │#37 b5, b4 │ │位置数据倍率 │
├─────┼──────┤ ├────────┤
│#3 b6 │#37 b6 │ │加减速模式 │
├─────┼──────┤ ├────────┤
│#3 b8 │#37 b8 │ │脉冲输出形式 │
├─────┼──────┤ 运行参数 ├────────┤
│#3 b9 │#37 b9 │ │旋转方向 │
├─────┼──────┤ ├────────┤
│#3 bll │#37 bll │ │极限减速模式 │
├─────┼──────┤ ├────────┤
│#3 b14 │#37 b14 │ │STOP输入极性 │
├─────┼──────┤ ├────────┤
│#3 b15 │#37 b15 │ │STOP输入模式 │
├─────┼──────┼─────┴────────┤
│#5, #4 │#39. #38 │最高速度 │
├─────┼──────┼──────────────┤
│#6 │#41. #40 │基底速度 │
├─────┼──────┼──────────────┤
│#15 │ - │加减速时间 │
├─────┼──────┼──────────────┤
│ - │#51 │加速时间 │
├─────┼──────┼──────────────┤
│ - │#52 │减速时间 │
├─────┴──────┼──────────────┤
│#16 │启动延迟时间 │
├────────────┼──────────────┤
│#18, #17 │目标地址Ⅰ │
├────────────┼──────────────┤
│#20. #19 │运行速度Ⅰ │
├────────────┼─────┬────────┤
│#25 b8 │运行指令 │1速定位运行开始 │
├────────────┼─────┴────────┤
│#54, #53 │目标地址变更值 │
├────────────┼──────────────┤
│#56, #55 │运行速度变更值 │
└────────────┴──────────────┘
===================1速定位运行时的注意事项===================
向目标位置的移动量较小时的动作
移动量(目标地址Ⅰ)所需时间比加减速需要的时间短时,实际运行速度不会达到运行速度Ⅰ。
通过1速定位运行开始指令,以运行速度Ⅰ运行,在目标地址Ⅰ减速停止。
1. 动作
1) 设定运行速度Ⅰ、目标地址Ⅰ。
2) 将运行指令的1速定位运行开始从OFF变成ON后,以运行速度Ⅰ开始1速定位运行。(定位结束标志位被置为OFF。)
3) 在目标地址Ⅰ减速停止,将定位结束标志位置为ON后结束运行。
http://www.fx-plc.com/upload/201603/250910536394.png
注意:移动量为0时,即便将1速定位运行开始置为ON,也不进行定位运行。此外,定位结束标志位也不发生变化。READY仅一瞬间置为OFF。
2. 地址指定
可指定绝对地址和相对地址。
指定绝对地址时:指定距离地址0的位置。
指定相对地址时:指定距离当前地址的移动量。
3. 旋转方向
指定绝对地址时:
旋转方向根据当前地址和目标地址Ⅰ的大小关系确定。
- 当前地址<目标地址Ⅰ:正转
- 当前地址>目标地址Ⅰ:反转
指定相对地址时:
旋转方向根据目标地址Ⅰ的符号(正/负)确定。
- 目标地址Ⅰ>0:正转
- 目标地址Ⅰ<0:反转
4. 定位结束标志位
运行开始时定位结束标志位置为OFF。
到达目标地址时,定位结束标志位置为ON。
┌────────────┬──────────────┐
│BFM编号 │设定项目 │
├─────┬──────┤ │
│定位参数 │扩展定位参数│ │
├─────┼──────┼──────────────┤
│#0 │#34, #33 │脉冲速率 │
├─────┼──────┼──────────────┤
│#2, #1 │#36. #35 │进给速率 │
├─────┼──────┼─────┬────────┤
│#3 bl, bO │#37 bl, bO │ │单位系统 │
├─────┼──────┤ ├────────┤
│#3 b5, b4 │#37 b5, b4 │ │位置数据倍率 │
├─────┼──────┤ ├────────┤
│#3 b6 │#37 b6 │ │加减速模式 │
├─────┼──────┤ ├────────┤
│#3 b8 │#37 b8 │ │脉冲输出形式 │
├─────┼──────┤ 运行参数 ├────────┤
│#3 b9 │#37 b9 │ │旋转方向 │
├─────┼──────┤ ├────────┤
│#3 bll │#37 bll │ │极限减速模式 │
├─────┼──────┤ ├────────┤
│#3 b14 │#37 b14 │ │STOP输入极性 │
├─────┼──────┤ ├────────┤
│#3 b15 │#37 b15 │ │STOP输入模式 │
├─────┼──────┼─────┴────────┤
│#5, #4 │#39. #38 │最高速度 │
├─────┼──────┼──────────────┤
│#6 │#41. #40 │基底速度 │
├─────┼──────┼──────────────┤
│#15 │ - │加减速时间 │
├─────┼──────┼──────────────┤
│ - │#51 │加速时间 │
├─────┼──────┼──────────────┤
│ - │#52 │减速时间 │
├─────┴──────┼──────────────┤
│#16 │启动延迟时间 │
├────────────┼──────────────┤
│#18, #17 │目标地址Ⅰ │
├────────────┼──────────────┤
│#20. #19 │运行速度Ⅰ │
├────────────┼─────┬────────┤
│#25 b8 │运行指令 │1速定位运行开始 │
├────────────┼─────┴────────┤
│#54, #53 │目标地址变更值 │
├────────────┼──────────────┤
│#56, #55 │运行速度变更值 │
└────────────┴──────────────┘
===================1速定位运行时的注意事项===================
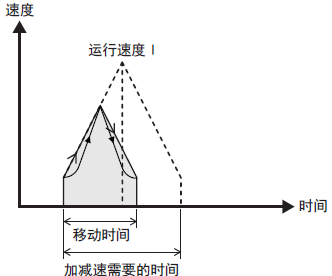
向目标位置的移动量较小时的动作
移动量(目标地址Ⅰ)所需时间比加减速需要的时间短时,实际运行速度不会达到运行速度Ⅰ。
本页关键词:1速定位,三菱PLC定位模块